บทความอ้างอิง;
>> ระบบ Tilt Compensation ในกล้อง Total Station Ep.1 (การทดสอบด้วยตนเอง)
>> ระบบ Tilt Compensation ในกล้อง Total Station Ep.2 ('สายเอียง' แล้วงัย ใครแคร์?)
>> ระบบ Tilt Compensation ในกล้อง Total Station Ep.2 ('สายเอียง' แล้วงัย ใครแคร์?)
>> ระบบ Tilt Compensation Ep.3 (กล้องฯ Total Station 'สายเอียง')
>> ระบบ Tilt Compensation Ep.4 ม้วน 1 (กล้องฯ Total Station 'สาย Offshore'...ล้ำลึก เกินจินตนาการ)
Video Credit: www.youtube.com/watch?v=EY9xq2j-7HM
Part II: การสำรวจรังวัดบน เรือ Barge
>> ก่อนที่จะเริ่มงานสำรวจรังวัด 'บนบก' ใดๆ ผู้ทำการสำรวจฯจะต้องจัดให้มีตำแหน่งควบคุมทางราบ-ทางดิ่ง (Control Survey) ที่มี 'คุณภาพ' อยู่ในเกณฑ์ยอมรับสำหรับโครงงานสำรวจฯนั้นๆเสียก่อน จึงจะสามารถเริ่มต้นทำการสำรวจฯต่อไปได้...ฉันใดฉันนั้น งานสำรวจฯบนเรือ Barge ก็ต้องการมี 'สภาพ' เช่นนั้น โดยผู้ทำการสำรวจฯจะต้องจัดเตรียมงานสำรวจฯตำแหน่งควบคุมทางราบ-ทางดิ่ง ให้แล้วเสร็จก่อน จึงจะสามารถเริ่มงานสำรวจฯอื่นๆ ต่อไปได้ อาทิ;
1. การ Setting Out หรือการกำหนด 'ตำแหน่ง' ที่จะใช้เป็นที่ตั้ง/ฐานรอง (Support/Foundation/Stool) ให้กับชิ้นส่วน/โครงสร้าง ที่จะถูกขนย้ายเข้ามาติดตั้ง หรือวางตั้งเอาไว้บนตัวเรือ ซึ่งชิ้นส่วน/โครงสร้าง ที่มีน้ำหนักมากเหล่านี้ 'ต้องการถูกติดตั้ง' ณ ตำแหน่งที่ 'ถูกต้อง' (ความละเอียดในระดับ 'มิลลิเมตร') เพื่อให้สอดคล้องได้ 'สมดุลทางน้ำหนัก' กับตัวเรือ
ภาพตัวอย่าง แสดงตำแหน่ง 'ฐาน' รองรับ ขา Jacket
(ตัวเรือได้ระดับสมดุล ภายหลังการจัดวางตำแหน่งติดตั้ง)

Photo Credit: www.marinelink.com
ตำแหน่งที่ 'ถูกต้อง' ในการติดตั้งวางตัว ชิ้นส่วน/โครงสร้าง นั้นๆ ถูกคำนวณ และถูกสร้างเป็นแบบจำลองการสมดุลน้ำหนักด้วยโปรแกรมประยุกต์เฉพาะทาง จากทีม Weighing โดยอาศัยแบบร่าง (Model) ของชิ้นส่วน/โครงสร้างแต่ละชิ้น, ขนาดน้ำหนัก และ 'แบบร่าง' ของตัวเรือ 'ที่มีค่าพิกัดกำกับ' นำมาประมวลผลร่วมกัน โดยหนึ่งในผลลัพธิ์ของการคำนวณนั้น คือการ 'กำหนดตำแหน่ง' บนพื้นผิวเรือ 'ด้วยค่าพิกัด' (มีค่า Tolerance บังคับว่ากันเป็น 'มิลลิเมตร') ที่ต้องใช้ในการติดตั้งตัวฐาน Support เพื่อเป็นตัวรองรับชิ้นส่วน/โครงสร้าง นั้นๆ ('ไม่ใช่' การขนย้ายเข้ามา แล้ววางลงที่พื้นเรือตรงๆ หรือวางลงตรงไหนก็ได้)* ขั้นตอนการสำรวจฯและจัดสร้าง 'แบบร่าง' ของเรือ 'ที่มีค่าพิกัดกำกับ'...จะถูกอธิบายในรายละเอียด ทางด้านล่าง ต่อไป
ภาพตัวอย่าง แสดงแบบจำลองการคำนวณน้ำหนัก และการจัดวาง ชิ้นส่วนต่างๆ
(เพื่อให้ตัวเรือมีความสมดุล ทางน้ำหนัก)

Photo Credit: https://amtmarine.ca
ทีม Weighing สามารถที่จะ 'ระบุ' ตำแหน่งแห่งที่ในการติดตั้งตัวฐาน Support แต่ละตัวว่า จะต้องติดตั้งที่ตำแหน่งส่วนใดของตัวเรือ เพื่อที่จะให้ตัวเรือได้สมดุลทางน้ำหนัก โดยพิจารณาจาก 'ค่าพิกัด' ที่ตัวโปรแกรมฯคำนวณได้ ซึ่งค่าพิกัด (Design) เหล่านี้ จะถูกส่งต่อไปยัง 'ทีม Survey' เพื่อใช้ทำการ Setting Out ตำแหน่งหน้างาน ให้กับทีมติดตั้งฐาน Support ต่อไป
2. งานสำรวจฯ Dimensional Control: งานที่ผู้เขียน ได้ลงตัวจริงอยู่บ่อยๆ นั่นคือ การที่ 'มักจะ' มีชิ้นส่วน/โครงสร้าง 'บางชิ้นงาน' ที่เพิ่งจะทำการประกอบแล้วเสร็จจาก Fabrication Shop แล้วถูกส่งมาทำการ Load ลงเรือฯ อย่างเร่งด่วน (ถึงเส้นตาย วันที่เรือต้องออกจากท่าฯ) ทำให้ทีมสำรวจฯ ต้องได้ 'รีบตามไป' ทำการสำรวจรังวัดขนาดต่างๆ ของชิ้นส่วน/โครงสร้าง (ที่ส่งงานล่าช้า) นั้นๆ อยู่บนเรือฯ และนั่นคือสาเหตุที่ผู้ทำการสำรวจฯ จำเป็นจะต้องสร้าง 'กระบวนการสำรวจฯ' เพื่อใช้บนเรือ ขึ้นมาโดยเฉพาะ
3. การใช้เรือ Barge เป็น 'สถานีฐานลอยน้ำ' (เพื่อการติดตั้งกล้องฯ) ในการสำรวจฯติดตั้ง (Installation) ชิ้นส่วน/โครงสร้างต่างๆ อยู่ในทะเล
ภาพตัวอย่าง แสดงฐาน Support รองรับขา Pipe rack แต่ละข้าง
(ฐาน Support ใช้สำหรับ 'ยึด' ตัวชิ้นงานให้ติดกับตัวเรือ)

Photo Credit: www.cryeng.com
จากอารัมภบทข้างต้น...ฟังๆดูเหมือนจะง่ายๆ ในการทำการสำรวจรังวัด 'อยู่บนเรือ' แต่ที่ไหนได้...มันต้องอาศัย 'องค์ประกอบที่ซับซ้อน' หลายปัจจัย โดยเฉพาะ 'ขั้นตอน' การจัดสร้างตำแหน่งควบคุมทางราบ-ทางดิ่ง ให้กับตัวเรือฯ...
(A) ปัญหา 'หน้างาน' ของนักสำรวจฯ
1. สภาวะการณ์ 'ไม่ได้ระดับ' ของตัวกล้องฯอยู่ตลอดเวลา: การได้ไปยืนอยู่บนเรือ Barge ที่มีขนาดใหญ่ เราอาจจะ 'ไม่สามารถสัมผัสถึงความสั่นไหว' หรือสำผัสถึงสภาวะความเอียงใดๆ แม้นว่าจะมองเห็นลูกคลื่นถูกพัดเข้ามากระทำกับตัวเรืออยู่เป็นระยะๆ...แต่กล้องฯ Total station ที่ติดตั้งอยู่บนพื้นเรือ Barge นั้น 'มีความสามารถที่จะตรวจพบ' สภาวะความไม่ได้ระดับ ผ่านทางค่า Tilt XY:ON โดยจะพบว่ามี 'ค่าไม่นิ่งสนิท' มีการเคลื่อนที่มาก-น้อย ไปตามขนาดลูกคลื่นที่เข้ามากระทำกับตัวเรือ (บางครั้ง มาจากหลายทิศทาง) โดยเรือ Barge ที่จอดลอยลำอยู่หลังแนวกำแพงป้องกันคลื่นทะเลนั้น 'ไม่กระไรนัก' แต่ถ้าจอดลอยลำอยู่หน้างานติดตั้ง (Installation) กลางทะเล...นั่นล่ะปัญหา?
* แตกต่างจากกล้องฯ Total station ที่ติดตั้งอยู่ 'บนบก' โดยถ้าตัวกล้องฯเกิดความไม่ได้ระดับ จะทำให้เกิดความเอียง ไปในทิศทางใดทิศทางหนึ่งเท่านั้น (เอียงทุกทิศทุกทาง นั้นไม่มี)

* เรือ Barge ที่มีขนาดใหญ่ การแกว่ง/เอียงของระดับน้ำจะ 'น้อยกว่า' เรือ Barge ที่มีขนาดเล็ก เมื่อมีขนาดลูกคลื่นขนาดเท่ากัน เข้ามากระทำกับตัวเรือ
* ทำไมไม่รอ? ให้กระแสคลื่นลมนิ่งสนิทเสียก่อน แล้วจึงทำการสำรวจฯ...คำตอบ; มีเหตุผลทางด้าน 'เวลา' เป็นสำคัญ ด้วยว่ายังมีงานอื่นๆที่ 'เข้าคิวรอ' ต่อจากงานสำรวจฯ ถ้าจะให้ 'ทีมอื่นๆ นั่งรอนอนรอไปก่อน' นั้น 'ทำไม่ได้' ด้วยว่าทุกสายงานในกลุ่ม Offshore (Oil & Gas) ส่วนใหญ่นั้น 'คิดอัตราจ้าง เป็นรายชั่วโมงทำงาน และราคาแพงเติบ'
2. ระบบพิกัดอ้างอิง: การสำรวจฯในสายงาน Land Survey ทั่วไป ใช้วิธีการอ้างอิงระบบพิกัดสากล/ระบบสมมุติ 'ที่มีพื้นผิวโลก' เป็นพื้นผิวอ้างอิงทางตำแหน่งพิกัด (ค่าพิกัดไม่มีการเปลี่ยนแปลง 'ตรงไหนก็ตรงนั้น'...ถ้าแผ่นเปลือกโลกไม่เกิดเคลื่อนตัวอย่างขนาดใหญ่)...หมายความว่า ทุกๆตำแหน่งบนพื้นผิวโลก ล้วนต่างมีค่าพิกัดกำหนดเอาไว้แล้ว (อ้างอิงกับระบบพิกัดนั้นๆ) แม้ว่าจะเป็นระบบพิกัดที่ถูกสร้างขึ้น 'แบบเทียม' ก็ตาม และเราไม่สามารถมองเห็นเส้นสมมุติเหล่านั้นได้ อาทิ เส้นรุ้ง เส้นแวง หรือเส้นตารางกริด ในระบบพิกัดต่างๆ...'เพราะมันไม่มีอยู่จริง'
* สมมุติว่า เรือ Barge จอดนิ่งสงบ ไม่ไหวติงใดๆ เป็นถาวรวัตถุ ฉะนั้นบนพื้นผิวของเรือ Barge ย่อมสามารถมีระบบพิกัดเทียมใดๆพาดผ่าน เช่นเดียวกันกับ สะพาน ท่าเรือคอนกรีต ฯลฯ แต่...เรือ Barge เป็นวัตถุที่ลอยน้ำ ไม่อยู่นิ่งคงที่ มีการเคลื่อนตัวมาก-น้อยอยู่ตลอดเวลา ฉะนั้น ระบบพิกัดสากลที่ Fixed ตำแหน่งทั้งหลายข้างต้น จึงนำมาใช้บนเรือ Barge ไม่ได้
2. ระบบพิกัดอ้างอิง: การสำรวจฯในสายงาน Land Survey ทั่วไป ใช้วิธีการอ้างอิงระบบพิกัดสากล/ระบบสมมุติ 'ที่มีพื้นผิวโลก' เป็นพื้นผิวอ้างอิงทางตำแหน่งพิกัด (ค่าพิกัดไม่มีการเปลี่ยนแปลง 'ตรงไหนก็ตรงนั้น'...ถ้าแผ่นเปลือกโลกไม่เกิดเคลื่อนตัวอย่างขนาดใหญ่)...หมายความว่า ทุกๆตำแหน่งบนพื้นผิวโลก ล้วนต่างมีค่าพิกัดกำหนดเอาไว้แล้ว (อ้างอิงกับระบบพิกัดนั้นๆ) แม้ว่าจะเป็นระบบพิกัดที่ถูกสร้างขึ้น 'แบบเทียม' ก็ตาม และเราไม่สามารถมองเห็นเส้นสมมุติเหล่านั้นได้ อาทิ เส้นรุ้ง เส้นแวง หรือเส้นตารางกริด ในระบบพิกัดต่างๆ...'เพราะมันไม่มีอยู่จริง'
* สมมุติว่า เรือ Barge จอดนิ่งสงบ ไม่ไหวติงใดๆ เป็นถาวรวัตถุ ฉะนั้นบนพื้นผิวของเรือ Barge ย่อมสามารถมีระบบพิกัดเทียมใดๆพาดผ่าน เช่นเดียวกันกับ สะพาน ท่าเรือคอนกรีต ฯลฯ แต่...เรือ Barge เป็นวัตถุที่ลอยน้ำ ไม่อยู่นิ่งคงที่ มีการเคลื่อนตัวมาก-น้อยอยู่ตลอดเวลา ฉะนั้น ระบบพิกัดสากลที่ Fixed ตำแหน่งทั้งหลายข้างต้น จึงนำมาใช้บนเรือ Barge ไม่ได้
* มีบางท่านได้แนะนำวิธีการกำหนดค่าพิกัดบนพื้นเรือ โดยให้ทำการยิงค่าพิกัด หรือถ่ายทอดระบบค่าพิกัดสากล 'จากบนฝั่ง' ลงไปยังพื้นของเรือ Barge 'คู่หนึ่ง' (ช่วงที่เรือ Barge จอดอยู่นิ่งๆ) เพียงเท่านี้ ก็มีระบบพิกัดในระบบนั้นๆใช้ออกงานแล้ว...ผู้เขียนได้ตอบกลับไปว่า "ไม่คิดถึงตอนที่เรือ Barge เดินทางออกจากท่าเรือ หรือเปลี่ยนตำแหน่ง หันซ้าย หันขวาเลยหรือ?"
(B) งานสำรวจฯ Control Survey บนเรือ Barge
>> วิธีการสำรวจฯ (ในส่วนของงานภาคสนาม) ที่จะอธิบายต่อไปนี้ เป็นวิธีการสำรวจรังวัดขั้นพื้นฐาน 'ดั้งเดิม' (แต่ก็ยังคงมีการใช้งานอยู่ในยุคปัจจุบัน) ที่ผู้เขียนได้รับการ 'ชี้แนะ' จากนายช่างสำรวจฯชาวต่างชาติ และตัวผู้เขียนฯได้ลงปฏิบัติงานจริง ด้วยวิธีการสำรวจฯดังกล่าวในช่วงระยะเวลาหนึ่ง โดยวิธีการที่จะอธิบายทางด้านล่างต่อไปนี้ มีความเหมาะสมกับเรือ Barge 'รุ่นเก่า' ที่ยัง 'ไม่มี' เทคโนโลยีการตรวจจับ/ติดตามการเคลื่อนไหวของตัวเรือในทุกมิติ (Vessel 4D Motion Sensor) เช่นในเรือ Barge รุ่นใหม่ๆ ยุคปัจจุบัน
* ยังมี 'วิธีการ' สำรวจฯบนเรือ Barge ที่ 'แตกต่าง' ไปจากวิธีการที่ผู้เขียนกำลังจะอธิบายต่อไปนี้ ด้วยว่า 'เทคนิคการสำรวจรังวัด' ถือเป็นมูลค่า 'ทรัพย์สินทางปัญญา' ประเภทหนึ่ง ของแต่ละบริษัทสำรวจฯ/หน่วยงาน ที่มักจะ 'ไม่บอก ไม่สอน ไม่เผยแพร่' ให้คู่แข่งทางการค้า ได้รับรู้
* มีบาง บ.สำรวจฯ ใช้การสำรวจฯ'แบบปกติ' บนเรือ Barge โดยจะเริ่มต้นทำการสำรวจฯก็ต่อเมื่อ เรือ Barge มีความนิ่งสงบเพียงพอ การทำการสำรวจฯจะอยู่ภายใต้ 'ย่านการชดเชย' (Tilt Compensation Range) ตลอดการสำรวจรังวัด ในการปรับแก้ชดเชยความเอียง และยามใดที่ระบบชดเชยไม่สามารถทำงานได้ เนื่องจากตัวเรือ มีการสั่นไหว/เอียง 'เกินขีดจำกัด' จึงจะหยุดทำการสำรวจฯนั้นๆ โดยจะ 'รอ' จนกว่าสภาพต่างๆจะเอื้ออำนวยต่อการสำรวจฯ จึงจะเริ่มทำการสำรวจฯต่อไป...บ.สำรวจฯ เหล่านี้มักจะเลือกใช้กล้องฯที่มีย่านการชดเชยสูงๆ หรืออย่างน้อยที่สุด คือ (+/-) 6''
Survey Procedures:
1. ขอแบบ Design (2D) ของตัวเรือ: ติดต่อหน่วยงานของเรือฯ เพื่อขอแบบร่าง (CAD Drawing) ของตัวเรือ สำหรับใช้เป็นฐานข้อมูลอ้างอิงในงานสำรวจฯภาคสนาม และภาคการประมวลผล
* ในกรณีที่ ไม่มีแบบร่าง (CAD Drawing) อันเนื่องมาจาก การเปลี่ยนมือผู้เป็นเจ้าของเรือ หรือไฟล์สูญหาย? จะต้องทำการสำรวจฯ As built 'ในพื้นที่ๆใช้สำหรับการบรรทุก' (รูปร่าง) ทั้งหมด (ขออนุญาติ ไม่ลงในรายละเอียด)






2.3 Control Survey Target: ทำการกำหนดตำแหน่ง ที่หมายที่จะใช้เป็นตำแหน่งควบคุมทางราบ-ทางดิ่ง (ถาวร หรือคงรูปยาวนานมากที่สุด) อาทิ บริเวณส่วนกลาง และปีกทั้งสองข้างของสะพานเดินเรือ, ตำแหน่งกราบเรือทั้ง 2 ข้าง (บริเวณกลางตัวเรือ) และตำแหน่งท้ายเรือทั้ง 2 ข้าง จากนั้นให้ทำการติดตั้งตัว Control Reflective Sheet ให้ครบทุกตำแหน่ง พร้อมกับกำหนดชื่อ/ID
* ในกรณีที่ ไม่มีแบบร่าง (CAD Drawing) อันเนื่องมาจาก การเปลี่ยนมือผู้เป็นเจ้าของเรือ หรือไฟล์สูญหาย? จะต้องทำการสำรวจฯ As built 'ในพื้นที่ๆใช้สำหรับการบรรทุก' (รูปร่าง) ทั้งหมด (ขออนุญาติ ไม่ลงในรายละเอียด)
ภาพตัวอย่าง แบบร่างของตัวเรือ HLV (ภาพ Top View แสดงเส้น Centerline of Gravity, CG)
Photo Credit: https://nbpc.co.jp/Fleet.html
2. การสำรวจฯ (Reconnaissance) ตัวเรือ Barge: การเดินตรวจสอบสภาพทั่วไป ของตัวลำเรือเบื้องต้น โดยตัวเรือที่มีความพร้อมเหมาะสม สำหรับงานสำรวจฯ Control Survey ที่มีคุณภาพนั้น ควรที่จะไม่มีชิ้นส่วน/โครงสร้าง ขนาดใหญ่+มีน้ำหนักมาก ใดๆ ที่ไม่เกี่ยวข้องกับชิ้นส่วนของตัวเรือ หลงเหลืออยู่บนลำเรือ (ควรเป็นเรือที่ว่างเปล่า เดิมๆ)
2.1 ทำการตรวจสอบ แนวเส้นผ่าศูนย์กลางลำเรือ (ในแนวราบ): เรือ Barge (HLV) ส่วนใหญ่จะต้องมีแนวเส้นยาวลากผ่านกลางลำตัวเรือ จากท้ายเรือมาถึงด้านหลังของสะพานเดินเรือ

ในเรือบางลำ อาจจะแสดงเป็นเส้นตารางกริด ซึ่งเส้นดังกล่าวอาจจะมีการ 'ลบเลือน' ตามกาลเวลา หรือในเรือบางลำ อาจจะแสดงเป็นสัญลักษณ์สามเหลี่ยม (หรือสัญลักษณ์อื่นๆ) แทนความหมาย 'Centre of Gravity' (CG) หรือแนวเส้นสมดุลของตัวเรือ ให้เห็นที่พื้นเรือ หรือด้านหลังของห้องสะพานเดินเรือ
ภาพตัวอย่าง สัญลักษณ์แสดงแนวเส้นสมดุลของตัวเรือ

2.2 การตรวจสอบตำแหน่ง Common Point: การ Identify ตำแหน่ง 'ร่วม' ของตัวเรือ (As built) กับแบบร่าง 'ให้ตรงกัน' หรือเป็น 'ตำแหน่งเดียวกัน' ในระนาบ 2 มิติ นั่นคือ การเลือกตำแหน่งต่างๆบนตัวเรือ (หน้างาน) อาทิ ขอบมุมของเรือ หรือขอบมุมชิ้นส่วนต่างๆ บนตัวเรือ, สัญลักษณ์บนพื้นเรือ, แนวเส้นตัด ฯลฯ ที่ผู้ทำการสำรวจฯพิจารณาแล้วว่ามีความ 'ตรงกัน' กับตำแหน่งต่างๆที่แสดงอยู่ในแบบร่าง...จากนั้น ให้ทำการ Mark/ID ตำแหน่งเหล่านี้ เพื่อที่จะย้อนกลับมาทำการสำรวจรังวัด ในขั้นตอนต่อไป
ภาพตัวอย่าง แสดงการกำหนดตำแหน่ง Common Point บนตัวเรือ Barge
(ขอบมุมต่างๆ สามารถ เห็นได้ชัดเจนในแบบร่าง)

Photo Credit: https://www.flickr.com/photos/33438735
ภาพตัวอย่าง การติดตั้งตัว Control Reflective Sheet อยู่ด้านหลังสะพานเดินเรือ

Photo Credit: www.ncbi.nlm.nih.gov
2.4 การสังเกตความ 'ได้ระดับ' หรือได้สมดุลของตัวเรือเมื่อลอยอยู่บนผิวน้ำ: ตัวเรือ Barge ในสภาวะ 'ไร้การบรรทุก' ย่อมได้สมดุลทั้งทางด้านหน้า และด้านหลัง และทางด้านข้าง โดยไม่เอียงไปในทิศทางใดทิศทางหนึ่ง (ในอุดมคติ)...ประเภทที่ว่า ใส่แหนบเพิ่มเป็นตับๆที่ล้อหลัง ทำให้ตูดรถยกขึ้น หน้ารถต่ำลง และกลับมาได้ระดับดังเดิม เมื่อยามบรรทุกผักเต็มหลังรถ...อันนี้ใช้ไม่ได้
ภาพตัวอย่าง แสดงความได้สมดุลทางระดับ ของพื้นเรือ Barge เมื่อ 'ไร้การบรรทุก'

Photo Credit: www.gpo-heavylift.com
ตัวเรือที่มีความ 'ได้ระดับ' อันหมายถึง การมีพื้นผิวตัวเรือที่ได้ระดับใน 'แนวระนาบ' ตามไปด้วย อาทิ กำหนดให้พื้นเรือที่จุดใด จุดหนึ่งมีค่าระดับ 100.000 ม นั่นคือ เมื่อทำการสำรวจรังวัดค่าระดับ ณ ตำแหน่งใดๆบนพื้นผิวเรือ ควรที่จะได้ค่าระดับอยู่ในช่วงค่าใกล้เคียงกับ 100.000 ม หรือในช่วงค่า Tolerance (+/- มม.) ที่ยอมให้ได้ ซึ่ง 'ค่า' ความได้ระดับดังกล่าว 'มักจะ' เป็นค่า As-built จาก 'อู่ต่อเรือ' เมื่อตัวเรืออยู่ในสภาวะ 'ได้ระดับ' อยู่บนบก ซึ่งยังมิได้รวม 'น้ำหนักจร' อันหมายถึง วัตถุต่างๆที่มีน้ำหนัก ที่อาจจะอยู่ หรือ 'ไม่อยู่ประจำเรือ' อาทิ กองลวดสลิง ขนาดใหญ่, กองขา Support (พบได้บ่อยสุด) หรือแม้แต่ ชิ้นงานต่างๆ 'ติดปลายนวม' ขอฝากไปกับเรือด้วย ฯลฯ
ภาพแสดง พื้นเรือมีความได้ระดับ (ในอุดมคติ)
(ศูนย์ดิ่งทางระดับ มีทิศตั้งฉาก Z กับแกนระนาบ XY)

* ในกรณีที่ 'ตัวเรือไม่ได้ระดับ' ส่งผลให้พื้นของเรือไม่ได้ระดับตามไปด้วย ซึ่งส่วนใหญ่จะเกิดการเอียงจากทางด้านท้ายเรือ 'จมลงในน้ำมากกว่าทางด้านหัวเรือ' (สังเกตุที่เส้น Draft line/Plimsoll line ข้างลำตัวเรือ) เนื่องด้วย (ส่วนใหญ่) ยังคงมี ชิ้นส่วน/โครงสร้างขนาดหนักใดๆ อยู่บนตัวเรือ หรืออยู่ในระหว่างการรอขนย้ายออกไป
ภาพตัวอย่าง พื้นผิวเรือเกิดความเอียง ลาดเทไปทางด้านท้ายเรือ

Photo Credit: https://steamcommunity.com
ถ้าหลีกเลี่ยงสภาวะการณ์ข้างต้น 'ไม่ได้จริงๆ' วิธีการสำรวจฯ Control Survey (ในส่วนงานคำนวณระนาบระดับของพื้นผิวอ้างอิง/พื้นเรือ ที่มีความ 'เอียง') จะใช้วิธีการสำรวจรังวัดทางตำแหน่ง และระดับของพื้นผิวตัวเรือ (อาทิ ตำแหน่ง a, b และ c หรือมากกว่า) ที่อยู่ในลักษณะ 'เอียง' ไปในทิศทางเดียวกันกับพื้นเรือ โดยการใช้สมการคำนวณด้วยวิธี Plane Best Fitting เพื่อสอบค่า Flatness ของพื้นผิวเรือ และทำการ 'แปลง' (Transformation) ข้อมูลสำรวจฯ (ในลักษณะเอียงๆ) ให้กลับมาอยู่ในแนวระนาบปกติ (ในอุดมคติ หรือตัวเรืออยู่ในแนวระนาบ ได้ระดับสมบูรณ์) โดยการใช้ระบบพิกัด และค่าระดับของแนวแกน 'ระนาบสมมุติ' เป็นตัวเปรียบเทียบ/อ้างอิง
* ขออนุญาติ ไม่ลงในรายละเอียดเรื่อง Flatness Survey เนื่องด้วยเกรงว่า เนื้อหาในบทความจะเย่นเย่อเกินควร...ท่านที่สนใจในประเด็นดังกล่าว กรุณาติดต่อหลังไมค์
ภาพตัวอย่าง การสอบรังวัดค่า Flatness
(คำนวณหาระยะทางตั้งฉากกับพื้นผิวเรือ ที่มีความเอียง)

แม้ว่าพื้นผิวที่กำลังเอียงอยู่ (หน้างาน) จะสามารถถูกปรับแก้ แปลงกลับคืนมาอยู่ในแนวระนาบด้วยวิธีการคำนวณ แต่ในสภาวะการณ์หน้างานจริงนั้น พื้นผิวเรือมิได้ 'ราบเรียบ' เนียนกริ๊บได้ระดับ ดั่งเช่นแกนระนาบสมมุติ...ในประเด็นนี้ ผู้เขียนต้องการชี้ให้เห็นว่า แม้พื้นผิวเรือจะเกิดความเอียง แต่ก็ยังสามารถทำการสำรวจฯและปรับแก้ได้ (ไม่ต้องรอให้ตัวเรือ ราบโล่ง หรือไร้การบรรทุกใดๆ) 'แต่ถ้าหลีกเลี่ยงได้ควรหลีกเลี่ยง' เพราะไม่ใช่พื้นผิวตัวเรือ 'ที่ได้ระดับ' แบบ As Is ลอยอยู่บนผิวน้ำจริงๆ ยามไร้การบรรทุก...เป็นเพียงพื้นผิวเรือที่ 'สมมุติ' ให้มีระนาบของพื้นผิวเรือที่ 'ได้ระดับ' เท่านั้น
* แต่ถ้ามีตัว Control Target ได้ถูกสำรวจฯ และติดตั้งไว้พร้อมสรรพแล้ว (ม้วน 3)...มาแบบเอียงๆก็ได้ ไม่ว่ากัน
ภาพตัวอย่าง พื้นผิว (พื้นเรือ) 'เอียง' บนแกนระนาบสมมุติ

3. ช่วงเวลา ทำการสำรวจฯเรือ Barge: ด้วยเหตุผลที่ว่า ต้องการให้สภาพของตัวเรืออยู่ในสภาวะ 'ได้ระดับ' (As is) มากที่สุด ก่อนที่จะทำการสำรวจรังวัดตัว Control Survey Target Sheet ฉะนั้นจึงควรเลือกช่วงเวลาทำการสำรวจฯที่มีคลื่นลม 'น้อยที่สุด' หรือมีความนิ่งสงบมากที่สุด โดยส่วนใหญ่จะเป็นช่วงเวลาเช่าตรู่ แต่ทั้งนี้ก็ขึ้นอยู่กับฤดูกาล ณ ช่วงเวลาทำการสำรวจฯ
4. การตั้งกล้องฯ Total Station บนพื้นเรือ: ควรใช้ 'เหล็กตอกนำศูนย์' (Puncher) เพื่อใช้ยึดปลายขากล้องฯไม่ให้ขยับ หรือเลือกใช้ Tripod Stabilizer Floor Guide ในการช่วยยึดขากล้องฯให้มีความมั่นคง แข็งแรง...ขากล้องฯ สาย Offshore ไม่เคยเปื้อนดิน เพราะ 'มันไม่มีดิน' ให้กล้องฯตั้ง
5. การปรับตั้งระดับน้ำ ให้กับตัวกล้องฯ: ในสภาวะที่คลื่นลมมีความนิ่งสงบ ลำตัวเรือมีการสั่น/ขยับน้อยที่สุด หรือมีความนิ่ง ตัวกล้องฯสามารถที่จะทำการปรับตั้งระดับน้ำฟองกลม/ฟองยาวได้ โดยให้ทำการเปิดระบบ Tilt XY:ON ซึ่งจะสามารถตรวจพบการเคลื่อนที่ของค่า Tilt ขยับไปมาบ้าง แต่ไม่มากนัก และตัวกล้องฯสามารถทำการปรับแก้ชดเชยได้
* ตำแหน่งตั้งกล้องฯ 'ตำแหน่งแรก' ในงานสำรวจฯติดตั้งตัว Control ให้ทำการ "เปิดระบบ Tilt XY:ON ตลอดการรังวัด" เนื่องจากต้องการให้ตัวเรือมีค่าพิกัด/ระดับ ถูกอ้างอิงในแนวระนาบอย่างแท้จริง ดังเช่นการสำรวจฯบนบก
ภาพตัวอย่าง แสดงตัวกล้องฯถูกติดตั้งอยู่บนเรือ Barge (งานสำรวจฯตัว Control Survey)
(อ้างอิงระนาบระดับ ดั่งเช่นการสำรวจฯบนบก ทั่วไป)

6. ระบบพิกัด และระดับอ้างอิง: 'ระบบพิกัดสากล' ไม่สามารถนำมาใช้กับการสำรวจฯบนเรือ Barge ดังเหตุผลที่ได้อธิบายข้างต้น ฉะนั้นระบบพิกัด และค่าระดับ 'สมมุติ' (Assume Coordinate and Level) จึงถูกนำมาใช้ในงานสำรวจฯประเภทนี้ โดยการกำหนดค่าพิกัด/ระดับเริ่มต้น 'ใดๆ' ให้กับตัวกล้องฯ อาทิ E:10000, N:20000 และ Z:100 เป็นต้น
จากนั้นทำการกำหนดแนวทิศอ้างอิง (Azimuth) โดยใช้เส้นผ่าศูนย์กลางลำเรือเป็นแนวทิศอ้างอิง โดยมีตำแหน่งอ้างอิง (Reference Object, RO) อยู่ที่ตำแหน่งศูนย์กลางลำเรือ (นิยมใช้สัญลักษณ์ของแนว CG ที่ติดอยู่ด้านหลังของสะพานเดินเรือ)
* ในประเด็นนี้ นายช่างฯสาย Offshore บางท่าน อาจจะกำหนดตำแหน่งอ้างอิง (RO) หรือภาคทิศ Azimuth ในทิศทางอื่นๆก็ได้ (แต่จะมีความซับซ้อน ในการประมวลผลภายหลัง)

7. การสำรวจฯ Control Reflective Sheet: ทำการส่องเล็งอ่านค่าไปยังตำแหน่ง Control Reflective Sheet ทุกตำแหน่ง ที่ได้จัดเตรียมไว้ก่อนหน้านี้ (ข้อ 2.3)
8. การสำรวจฯแนวเส้น Center Line (CL): ทำการรังวัดอ่านค่าแนวเส้น CL (จากข้อ 2.1 โดยให้ได้ตำแหน่งกลางเส้นมากที่สุด) ทางด้านท้ายเรือ และด้านหลังสะพานเดินเรือ (ในประเด็นนี้ จะได้เส้นตรง 1 เส้น จากจุดสำรวจฯหัว-ท้าย 2 ตำแหน่ง)
9. การสำรวจฯตำแหน่ง Common Point: ทำการรังวัดอ่านค่า 'จุดตำแหน่งร่วม' (จากข้อ 2.2)
10. การสำรวจฯ พื้นผิวตัวเรือ:
10.1 ตัวเรือมีความได้ระดับ As is: ทำการรังวัดอ่านค่าตำแหน่ง และค่าระดับ 'พื้นผิวของตัวเรือ' อาทิ ตำแหน่ง a, b และ c หรือจำนวนที่มากกว่า) สำหรับใช้ในการสอบค่า Flatness
10.2 ตัวเรือมีความไม่ได้ระดับ: ในกรณีที่ตรวจพบ ความไม่ได้ระดับ 'อย่างมีนัยสำคัญ' ทางด้านใดด้านหนึ่ง อาจจะชี้ถึงสภาวะความไม่สมดุลของตัวเรือ หรืออาจจะชี้ถึงความยุบตัว-พองตัว ความเสื่อมสภาพของพื้นผิวเรือ ซึ่งในประเด็นนี้ ต้องทำการแจ้งให้กับหน่วยงานของเรือฯได้รับทราบ และทำการแก้ไข/สืบสาเหตุต่อไป
11. การประมวลผล:
11.1 Changing Unit: นำไฟล์ CAD แบบร่าง (2D) ข้างต้นมาทำการแปลง/เปลี่ยนหน่วย จาก 'มิลลิเมตร ให้เป็น เมตร' (ไฟล์แบบร่างเหล่านี้ นิยมออกแบบในหน่วย มม.) เพื่อให้สอดคล้องเข้ากับข้อมูลสำรวจฯที่ได้จากกล้องโททอล สเตชั่น (หน่วย:เมตร) จากนั้นให้ทำการ 'หมุน' แบบร่างของตัวเรือ (Top View) ให้มีทิศทางของหัวเรือ อยู่ในแนวทิศเหนือ-ใต้ (ถ้าแบบร่างฯ ที่ได้รับมามีการวางตัวของตัวเรือในแนวนอน)11.2 Coordinate Transformation: ทำการ 'แปลง' (Transform) แบบร่าง (2D) ที่มีค่าระบบพิกัด 'ใดๆ' (ข้อ 11.1) ให้เข้ามา 'วางตัว' อยู่ในระบบพิกัดอ้างอิง ที่ใช้ในการสำรวจฯ อาทิ E:10000, N:20000 โดยอาศัยตำแหน่ง 'จุดร่วม' (Common Point) หรือที่ 'จุดตำแหน่งเดียวกัน' ระหว่าง ค่าพิกัดที่ได้จากการสำรวจรังวัดหน้างาน (ข้อ 2.2) vs ค่าพิกัดที่ได้จากแบบร่าง นั่นคือ การใช้ค่าพิกัด 2 ชุด นำมาทำการเปรียบเทียบ และคำนวณหาค่า Shift, Translate และค่า Rotate จากระบบพิกัดของแบบร่างฯ (ข้อ 11.1) ไปสู่ ระบบพิกัดอ้างอิงที่ใช้ในการทำการสำรวจฯ
* ชนชาว Autolisp (*.lsp) ที่สนใจในวิธีการ 'แปลงตัวชิ้นงาน' จากระบบพิกัดหนึ่ง ไปยังระบบพิกัดหนึ่ง โดยการใช้ค่าพิกัดจาก 'จุดร่วม' ในระนาบ 2 มิติ กรุณาติดต่อหลังไมค์ (ปันปัน)

ภายหลังกระบวนการ 'แปลง' (Transformation) เสร็จสิ้น ตัวแบบร่างของเรือ (2 มิติ) จะถูกย้ายเข้ามาอยู่ในระบบพิกัดอ้างอิงที่ใช้ในการสำรวจฯ นั่นหมายความว่า 'ทุกๆตำแหน่ง' บนพื้นเรือ Barge ได้มีค่าพิกัดอ้างอิง 'ในแนวระนาบ' (อ้างอิงกับตัวเรือ) กำกับเอาไว้แล้ว
* ในกรณีที่ใช้โปรแกรม 'เฉพาะทาง' ทำการแปลงค่าพิกัด อาทิ SEVENPAR หรือ อื่นๆ โดยภายหลังการแปลงระบบพิกัด ตัวโปรแกรมประยุกต์เหล่านี้ จะแสดงผลค่า Residual Error (Design vs as built) สำหรับใช้ในการตรวจสอบความ 'Matching' ทางตำแหน่ง ซึ่งส่วนใหญ่จะอยู่ในระดับ มม. อย่างไม่มีนัยสำคัญ
ภาพตัวอย่าง แสดงตัวเรือ Barge มีค่าพิกัด กำกับเอาไว้แล้ว

* ในยุคถัดมา ผู้เขียน 'ได้เปลี่ยน' มาใช้โปรแกรมแปลงค่าพิกัด 'เฉพาะทาง' ซึ่งสามารถแสดงค่า Residual Error ภายหลังการแปลงได้โดยตรง จึงได้เลิกใช้ *.lsp ไปในที่สุด แต่ทั้งนี้ เท่าที่ผู้เขียนได้ตรวจสอบ และเปรียบเทียบข้อมูลภายหลังการแปลงระบบพิกัด จากทั้ง 2 วิธี การใช้ *.lsp และการใช้โปรแกรมฯ มิได้ให้ผลลัพธิ์แตกต่างอย่างมีนีนัยยะ (ไม่มีตัวโปรแกรมฯ ใช้ *.lsp แทนก็ได้ สำหรับวิญญูชนสาย CAD)


11.4 Final Checks: ณ บรรทัดนี้ ตัวเรือ Barge ได้มีตำแหน่ง Control Survey (Reflective Target Sheet) สำหรับใช้เป็นตำแหน่งควบคุมทางราบ-ทางดิ่ง 'ประจำตัวเรือ' กำกับเอาไว้แล้ว โดยมีทิศทางการอ้างอิงทางราบ 'ในแนวระนาบ' ขนานกับพื้นเรือ (ในสภาวะที่ตัวเรือนิ่งสงบ) และมีการอ้างอิงทางระดับ ที่มีศูนย์ดิ่งตั้งฉากกับพื้นเรือที่ได้ระดับ เฉกเช่นเดียวกับการสำรวจฯบนบกทั่วไป (อ้างอิงกับพื้นผิวโลก) ซึ่งจะเรียกสภาวะของตำแหน่งควบคุมทางราบ-ทางดิ่ง นี้ว่า 'สภาวะฐานอ้างอิงได้สมดุล' (ไม่มีความเอียงใดๆ) เพื่อใช้เป็นตัวร่วมในการคำนวณ และเปรียบเทียบกับการสำรวจรังวัดใน 'สภาวะที่มีความเอียง' ซึ่งจะอธิบายในตอนต่อไป

Photo Credit: https://free3d.com
ในประเด็นนี้ ตัวเรือฯมีความพร้อมในการถูกใช้เป็น 'สถานีฐาน โดยมีตำแหน่ง/ระดับอ้างอิง ที่ลอยอยู่บนน้ำ' ในการทำการสำรวจรังวัดอื่นๆ ที่อยู่บนตัวเรือฯต่อไป ทั้งในสภาวะตัวเรือมีความได้ระดับ และ 'ไม่ได้ระดับ' อีกทั้งยัง 'ไร้ข้อจำกัด' ทางด้านตำแหน่ง (ตัวเรืออยู่ที่ไหน ก็สามารถทำการสำรวจฯได้) และ 'ทิศทาง' การหันหน้าของตัวเรือ (หัวเรือหันหน้าไปทางทิศใดๆ ก็สามารถทำการสำรวจฯได้)
* และที่สำคัญ...เมื่อตัวเรือฯเกิดความเอียง ซ้าย-ขวา หรือ ขยับขึ้น-ลง ก็สามารถทำการสำรวจฯได้
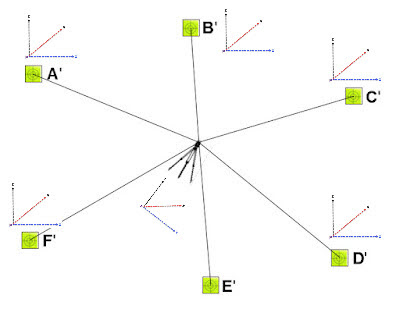
ภาพตัวอย่าง แสดงแนวทิศของระบบพิกัด ที่ใช้บนตัวเรือฯ
(มีทิศทางอ้างอิง ไปตามทิศของหัวเรือ)

12. ส่งมอบแบบร่างตัวเรือฯ ให้กับทีม Weighing: แบบร่างของตัวเรือฯ ที่มีระบบพิกัด 'กำกับ' เอาไว้แล้ว ถือเป็นองค์ประกอบหนึ่งที่สำคัญ เพื่อใช้ในการ 'ออกแบบตำแหน่ง' ที่จะใช้เป็นฐานรองรับ หรือฐานติดตั้ง ชิ้นส่วน/โครงสร้างต่างๆ ที่จะถูกขนย้ายเข้ามาวางบนตัวเรือฯ ซึ่ง 'ตำแหน่ง และน้ำหนัก' จะต้องมีความสำพันธ์กับตัวเรือฯ ผ่านการประมวลผล และการสร้างแบบจำลองสมดุลน้ำหนัก
ภาพตัวอย่าง แสดงการสร้างแบบจำลองสถานการณ์ 'การจัดวาง' น้ำหนัก

Photo Credit: www.amtmarine.ca
และเมื่อสามารถประมวลผลค่าพิกัด (ในแนวระนาบ) ที่ถูกต้อง ได้สมดุลกับน้ำหนักที่จะถูกนำเข้ามาจัดวาง ได้แล้ว...จึงส่งมอบชุดข้อมูลค่าพิกัดดังกล่าว ให้กับทีม Survey เพื่อทำการ Setting Out ตำแหน่งต่อไป (อารมณ์เดียวกันกับ การรับเอาค่าพิกัดตำแหน่งตอกเสาเข็ม แล้วออกไปทำการ Staking ในสายงาน Land Survey ปกติ) * การส่งมอบไฟล์แบบร่างของตัวเรือ ที่มีระบบพิกัด 'กำกับ' เอาไว้แล้ว ให้กับทีม Weighing...ในประเด็นนี้หมายความว่า นายช่างสำรวจฯเป็น 'ผู้กำหนด' ระบบพิกัด และค่าระดับของตัวเรือฯ...แต่...บางครั้งก็มีประเด็น 'ดราม่า' ที่ทีม Weighing ต้องการเป็นผู้กำหนดระบบพิกัด และค่าระดับของตัวเรือฯ โดยเป็นผู้ส่งมอบไฟล์แบบร่างของตัวเรือฯที่มีระบบพิกัดกำกับ (แสดงตัวเลขค่าพิกัด เแปลกๆ) ไว้แล้ว ให้กับทีม Survey เพื่อนำไปใช้อ้างอิงในการสำรวจฯติดตั้งตัว Control Survey ให้มีระบบพิกัด และค่าระดับ 'สอดคล้อง' กับไฟล์แบบร่างฯ ดังกล่าว ซึ่งในประเด็นนี้ นายช่างสำรวจฯเพียงแค่ทำการแปลงระบบพิกัด จากระบบพิกัดอ้างอิงที่ใช้ในการทำการสำรวจฯ 'ไปสู่' ระบบพิกัดของแบบร่างฯของทีม Weighing (อย่าลืมตรวจสอบ 'หน่วย' (Unit) ให้ตรงกันเสียก่อน)
>> ขั้นตอน/วิธีการ ที่ค่อนข้างจะซับซ้อน 'ไม่เหมือนชาวบ้านชาวช่อง ในสาย Land Survey ทั่วไป' ที่ผู้เขียนได้อธิบายข้างต้นนี้ คือ Concept Idea ของการสำรวจฯ 'เฉพาะ' งาน Control Survey เท่านั้น...หรือกล่าวได้ว่า มี 'ตำแหน่งอ้างอิง' เพื่อใช้ 'เริ่มต้น' ออกงานสำรวจฯได้แล้ว (เริ่มต้นทำการสำรวจฯ ได้เสียที)
>> ขั้นตอน/วิธีการ ที่ค่อนข้างจะซับซ้อน 'ไม่เหมือนชาวบ้านชาวช่อง ในสาย Land Survey ทั่วไป' ที่ผู้เขียนได้อธิบายข้างต้นนี้ คือ Concept Idea ของการสำรวจฯ 'เฉพาะ' งาน Control Survey เท่านั้น...หรือกล่าวได้ว่า มี 'ตำแหน่งอ้างอิง' เพื่อใช้ 'เริ่มต้น' ออกงานสำรวจฯได้แล้ว (เริ่มต้นทำการสำรวจฯ ได้เสียที)
งานสำรวจฯ Setting Out บนเรือ Barge
Ep. 4 ม้วน 3 Coming Next